2. 3 试验结果及分析
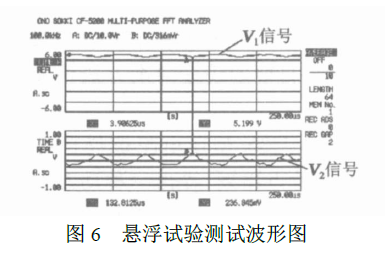
在测试时,我们首先调节压电振子的振幅大小,让金属板处于悬浮状态,然后观察两路电压信号的波形,信号被衰减10 倍后输入到CF5220 快速傅里叶分析仪中,测试所得波形如图6 所示。图中波形A 为压电振子两端的电压信号,波形B 为串接电阻R 两端的电压信号。
分析图6 可得
(1) 电阻RC 两端所分得的电压很大,电阻R两端电压很小。
(2) 金属板处于悬浮状态。如果金属板没有被悬浮起来,处于接触状态的话,压电振子两端的接触电阻很小(只有0. 2 Ω) ,串接电阻R = 11. 7 kΩ ,所分得的电压V 1 = 0. 85 mV ,电阻两端电压较高。由图6 所得到的是压电振子两端的电压V 1 较大,而电阻两端的电压V 2 很小,两个波形存在的相位差约为90°。
(3) 由相位差我们可以分析,压电振子振动时,金属板被悬浮起来,由于间隙的存在可视为电容元件。由于间隙的变化,导致电容值C 不断变化, 由电学知识可知
式中 s 为电容的重叠面积; l 为电容两极板间的间隙。
(4) 由波形A 的变化可知悬浮间隙是动态的。如果间隙l 不变,电容C 为定值,整个电路相当于断路,没有电流,电阻两端电压为0 ,电容两端电压为50 V。
(5) 根据测试电路可得悬浮间隙表达式为
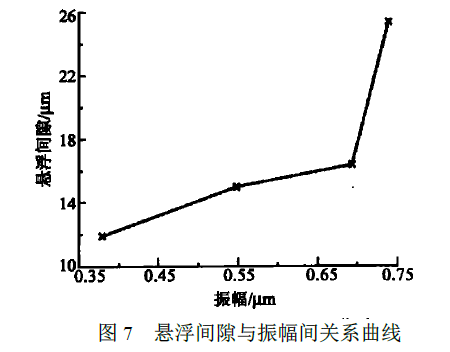
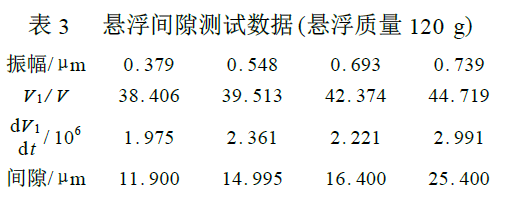
式中 S 为接触面积; V 为电源电压; V 1 为压电振子两端电压, dV 1 / dt 可由傅里叶分析仪直接读出。由上述分析得出,悬浮间隙为动间隙,从电压变化的范围来看,间隙的变化较小,近似认为悬浮间隙恒定。测试数据如表3 所示,串接电阻R = 11. 7 kΩ ,面积S = 1. 257 ×10 - 3 m2 (试验用压电振子辐射端面中间有一螺纹孔) 。整理表中数据可得悬浮间隙与压电振子振幅之间的关系曲线(见图7) 。从图7可见,压电振子振幅变大,悬浮间隙也越来越大。当振幅减小或悬浮物加重时,振动表面与物体之间的间隙变得很小,此时超声振动对物体的作用主要表现为摩擦力减小;当振幅加大或悬浮物较轻时,它们之间的间隙明显,表现为对物体的悬浮作用。
3 结论
本文介绍的方法是在DMU3X 型压电陀螺的大量特性实验数据的基础上总结得出,它同样适用于特性相似的其他型号的陀螺。
3. 1 应用本方法的优点
a. 校零所需时间很短,有利于陀螺的快速启动。
b. 由于该方法所需的计算量不大,对惯性测量组合的CPU 要求很低,从而可以缩小组合系统的体积和质量(CPU 的功能越强往往体积和质量也越大) ,这对系统是非常有利的。
c. 由于校零是动态的,在解决零位重复性问题的同时也解决了陀螺输出对环境温度敏感的问题,省去了繁琐的建模过程,可以大大减少实验的数量,从而大大降低了生产的成本,更有利于批量生产。
d. 应用此方法时,我们希望在启动时载体的姿态变化越小越好。
e. 该方法在解决零位重复性问题时非常有效,并且和其他的校零和补偿方法不矛盾,可作为陀螺仪初校方法,然后和其他方法结合一起使用以进一步提高惯性测量组合的精度。
3. 2 应用此方法需要注意的问题
a. 单独应用本方法时,在陀螺工作时间内,我们忽略了其零位电压和零位电压漂移量的变化。若要在零位电压和零位电压漂移量的变化较大的情况应用此方法,需结合其他方法对变化加以控制。
b. 优点c 针对的是工作过程温度变化不大的情况,如果由于陀螺自身工作发热、散热设计不好等原因造成工作过程陀螺的温度变化较大,影响到陀螺的输出,这时仍需加入温度补偿算法。
c. 要降低本方法的误差的一个关键在于降低信号不同步时间Δt ,在本方法中的Δt 不是要求实时同步,而是校准时所用数据起始时间的同步,可以用相应的寻找起始时间同步的算法以及使用硬件同步的方法降低,以进一步提高精度。
结束语
从实验可以看出,超声振动对物体具有悬浮和动压润滑能力是可以肯定的,其悬浮能力和动压润滑能力与振动强度有关。利用这种方法构造超声波轴承的关键是如何利用超声振动获得对轴颈的悬浮支撑和动压润滑能力,需要进一步深入研究。
作者:彭太江 杨志刚 阚君武 曾 平
(1. 吉林大学链传动研究所,吉林长春130025 ;2. 吉林大学机械科学与工程学院,吉林长春130025)






 鹏翔新闻
鹏翔新闻


{kind=link}